Can you imagine driving on the Moon at your office desk? With new simulation technology, Element Robotics is saving missions valuable time and money – and above all, making it easy.
Key facts
Key facts
- LunarSim is an accurate, easy-to-use simulation of the Moon’s surface for testing lunar rovers and infrastructure.
- The concept took shape during the project to create Roo-ver, Australia’s first lunar rover.
- It’s based on extensive data collected from previous lunar missions, and designed to keep users focused on their testing without needing to tweak the simulation architecture.
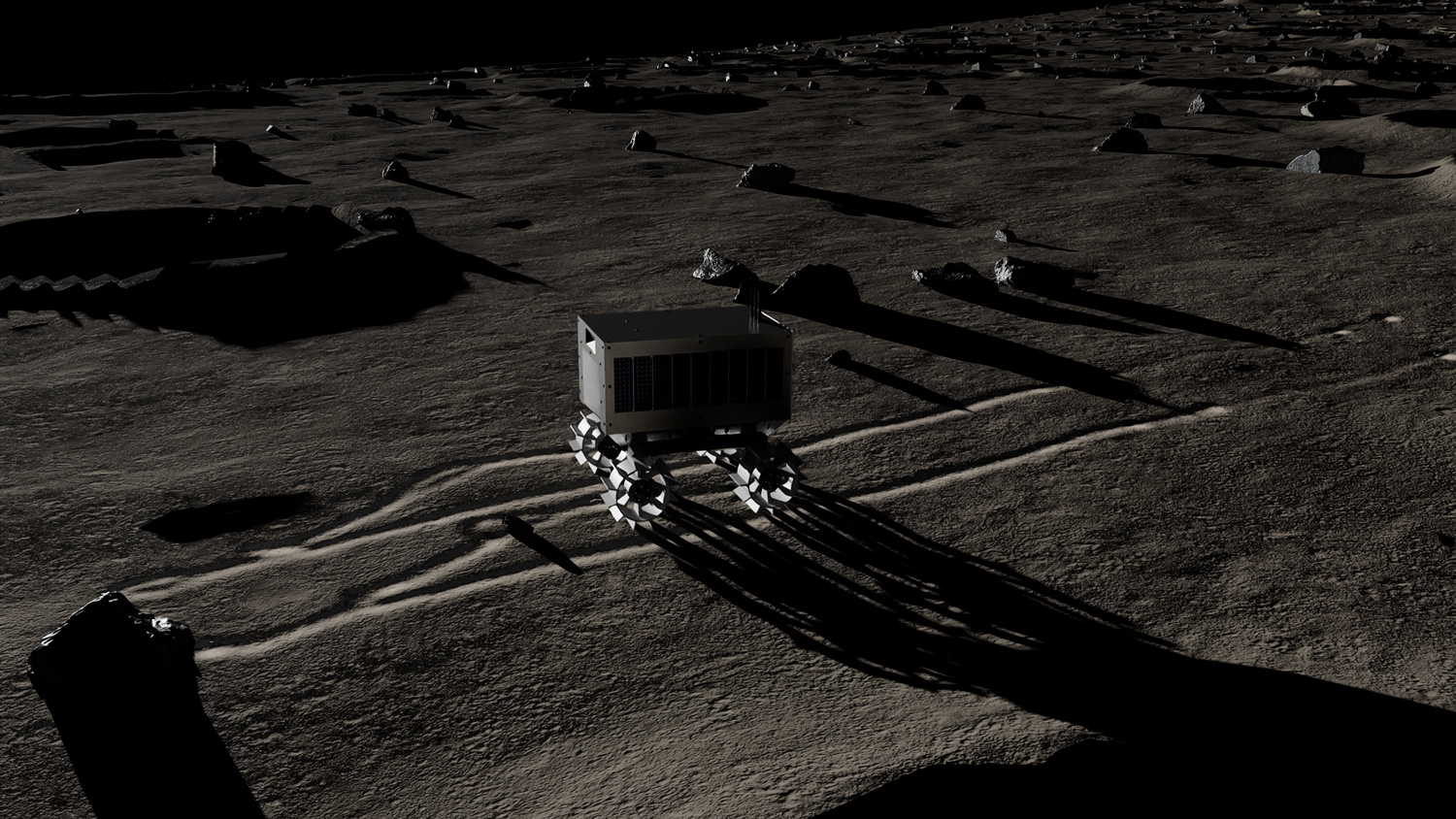
The Melbourne start-up has created LunarSim: a high-res, 3D digital replica of the lunar surface, developed with support from the Australian Space Agency’s Moon to Mars program.
It allows companies building lunar rovers to drive their unique designs around the lunar simulation, testing their performance before launching a mission or even building any hardware.
Companies developing architecture such as lunar landers and lunar habitats can insert their designs into the simulation as well.
Element Robotics co-founder and roboticist Tenzin Crouch points out two key reasons for developing LunarSim.
“It's really expensive to send things to the Moon – and we don't have a lot of people with experience operating things on the Moon,” Tenzin says.
“So, we need to have ways to test the systems before they go to the lunar surface, and we need to have ways that we can teach people how to work with the systems.”
“It’s like if you were trying to build a building – you can say, well, let's make a digital copy of this building and put it in that place and see how it works… we're kind of doing the same thing for lunar surface systems.”
Beginnings abroad
Element Robotics was founded in 2023 by Tenzin and his business partner Saksham Khurana, an engineer and entrepreneur who now serves as the company’s CEO.
They’d just spent two years at Carnegie Mellon University in Pittsburgh, Pennsylvania building MoonRanger: an autonomous lunar rover set for a 2029 mission to search for hydrogen near the lunar south pole.
Through that process, the duo’s concept for LunarSim began to develop, along with ideas about how to keep lunar mission infrastructure affordable as the industry scales up.
“We got quite involved in looking at the new space industry… how we're commercialising a lot of these surface transport operations, landing operations,” Tenzin says.
“So that was kind of the genesis of, like how can we take this experience and knowledge we have, particularly on the software side, and turn that into a product that we can scale?”
Innovating with Roo-ver
The newly formed company soon became involved in the Australian ELO2 consortium – which at the time was preparing its winning prototype bid to build Roo-ver, Australia’s first lunar rover, under the Australian Space Agency’s Trailblazer program.
Munir Azme, an Element Robotics engineer initially hired as an intern while studying at Monash University, says the Trailblazer prototype is what ultimately gave rise to LunarSim.
“I joined in to help with the development of the autonomy system for Roo-ver, and while we were working on that project, kind of in the background, we started working on a simulation as well,” Munir says.
“We didn't always have access to regular testing facilities and stuff, so the simulation was a good way to test our algorithms before we actually went out (for a physical test).”
“That was kind of a simplified version of what we currently have… so when we received the Moon to Mars funding last year, I worked on helping expand that to something that has a higher fidelity.”

How the simulation works
Just as exploring the Moon is an extreme human endeavour, simulating it is an unusual software development challenge.
Because while simulations of Earth environments are based on access to a wealth of data and experience, the Moon is a distant land that humanity has barely touched in the first place.
To accurately simulate something so foreign, LunarSim draws on photos from previous lunar spacecraft, measurements from the Apollo missions, and constantly evolving satellite data which scientists have used over decades to extrapolate principles about the lunar surface.
Element Robotics’ engineers, like Munir, have the job of converting those available ingredients into the digital representation featured in LunarSim.
“The highest-resolution elevation models of the lunar surface are still relatively low-resolution – in many cases, you get around 5 metres per pixel for the terrain data,” Munir says.

“Using the data that we know, statistics around what the lunar surface looks like, we upscale that to get a lot more detail that would be relevant to a rover.”
“We generate rocks and craters and perturb the surface as well… make the surface more relevant for a rover's mobility.”
And while LunarSim is not the only lunar simulation on the market, Munir emphasises that its focus – and point of difference from its competition – is to make it easy for users who just want to get in and drive.
“We’ve kind of simplified the architecture to the point where, as a roboticist, you can focus solely on developing that robot, and not worry too much about understanding the simulation side of things,” Munir says.
Element Robotics also worked with Zendir, another Australian company, to incorporate models of key spacecraft and rover subsystems into LunarSim.
Using digital twin technology, the models can simulate electrical, thermal, and radiation behaviour – so as well as understanding how a rover moves across the Moon, users can understand how the rover will perform in the harsh lunar environment.
Pitching for Roo-ver
LunarSim is currently being considered for use supporting Roo-ver, as the team prepares for the physical challenges of the Moon that can’t easily be tested on Earth.
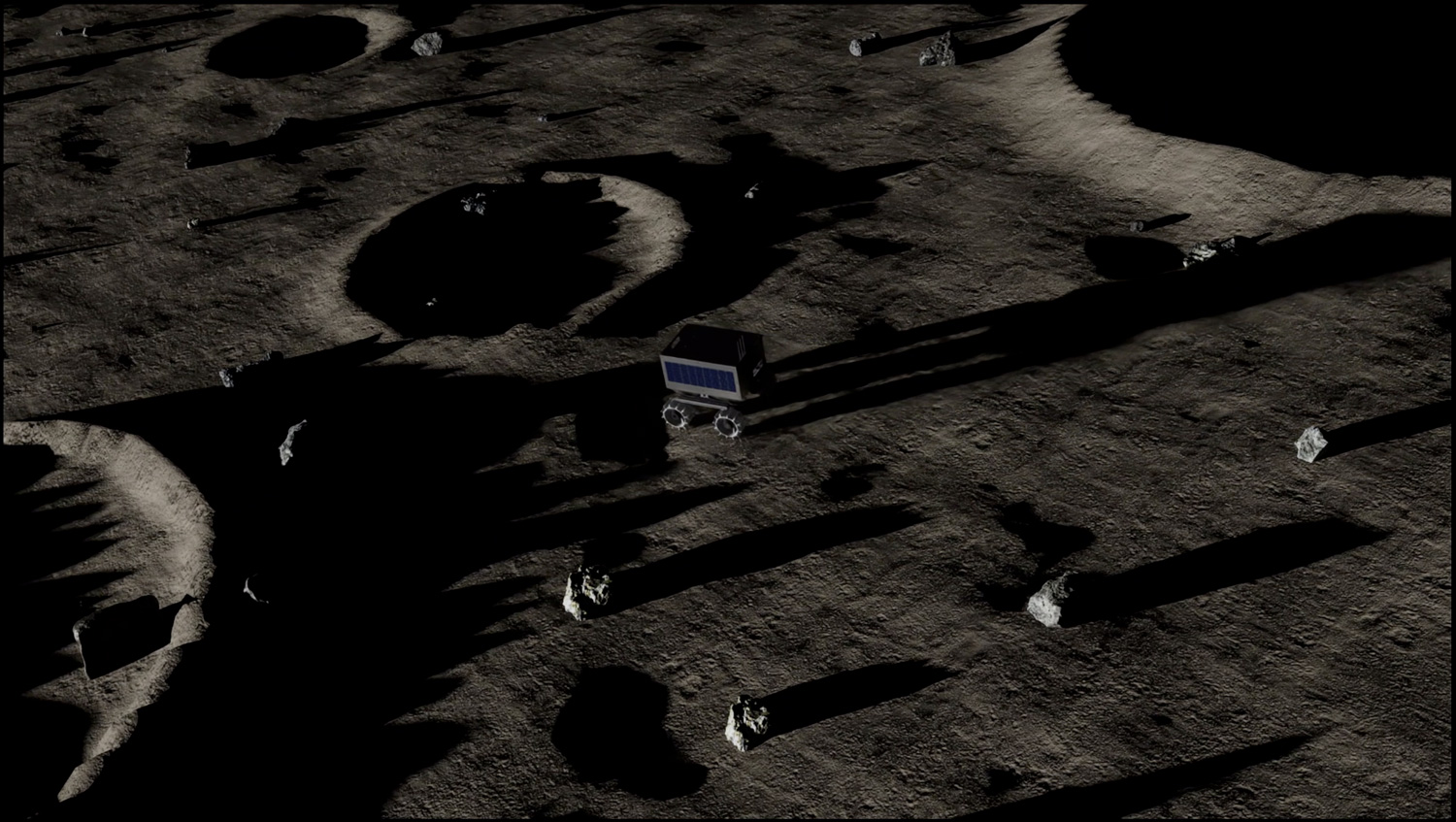
In particular, the simulation could be used to evaluate Roo-ver’s navigation algorithms across rocks, craters, and varying lighting conditions – and as Tenzin explains, it offers an opportunity to safely push the rover design to its limits.
“We don’t want to test the actual physical model of the rover that we built to the point where it breaks… it’s going to go to the Moon, so being able to test things in a non-destructive way is really valuable,” Tenzin says.
“If we wanted to see how the robot performs with a motor that’s turned off, because maybe a motor will fail… we can simulate these conditions and test it out.
“That’s one of the really big advantages of a simulated environment: the ability to test all of these fault scenarios which we hope don’t happen, but if they do happen, we damn well want to be sure we’ve thought about it before we go on a mission.”

Meanwhile – helping realise one of Tenzin’s main goals for the software – LunarSim could also give personnel involved in operating Roo-ver an opportunity to become more familiar with the mission and more confident in their role, no matter what challenges arise.
He relates this realistic operational practice to the military concept of ‘train as you fight’.
“You don't want to have just a paper exercise where you're like, ‘if this happens, what would we do?’,” Tenzin says.
“It's like – ‘no, this actually happened, I'm getting the real data in my real mission screen, and now I've got to respond to it’… then everyone's quite familiar, and in a high-pressure situation, they're able to perform.”
Looking ahead to a lunar future
As well as exploring the adaptation of LunarSim for industries on Earth like mining, construction, and maintenance operations, Element Robotics is busy scouting further lunar mission opportunities.
The company acknowledges it won’t be easy at first, given the challenge in clearly demonstrating the value of a behind-the-scenes product.
However, with the US planning several lunar missions from 2027, more missions scheduled internationally, and Australian organisations getting involved, the team is buoyed by opportunity.
Tenzin believes LunarSim could be part of a revolution enabling mission operators to affordably push their preparation much further.
“With the cost of compute, and these kinds of automated simulation systems that scale really easily… there is really no excuse anymore to say, ‘my software's only been tested for 200 or 300 hours’,” Tenzin says.
“My goal is to enable everyone to say their software has operated for a million hours before going to the Moon.”
“That enables us to then get those million hours on our software stack as well – and we can then say our software is much more reliable, and enables people to have a lot more confidence to use higher levels of autonomy for their missions going forward.”
Industry showcase
Australian space innovations making an impact.
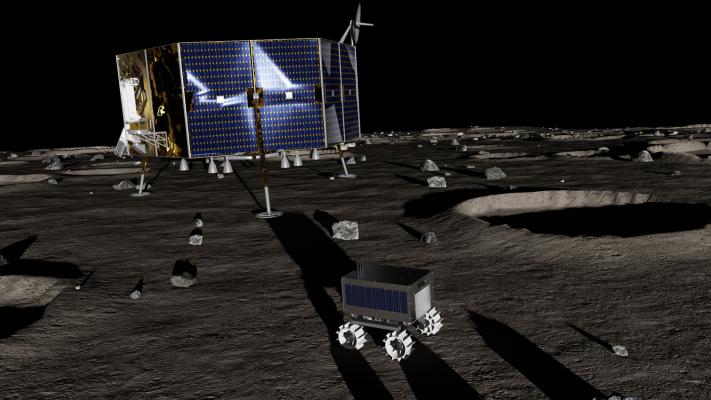
Main image caption: A lunar rover and lunar lander in LunarSim.
Credit: Element Robotics