Signalling Australia’s next space workforce.
UQ Space from the University of Queensland claimed first place at last month's 2026 Australian Rover Challenge (ARCh) after competing with 17 university teams. The global competition was led by Adelaide University and supported by the Australian Space Agency and industry consortium ELO2 that is building Roo-ver, the nation's first Moon rover.
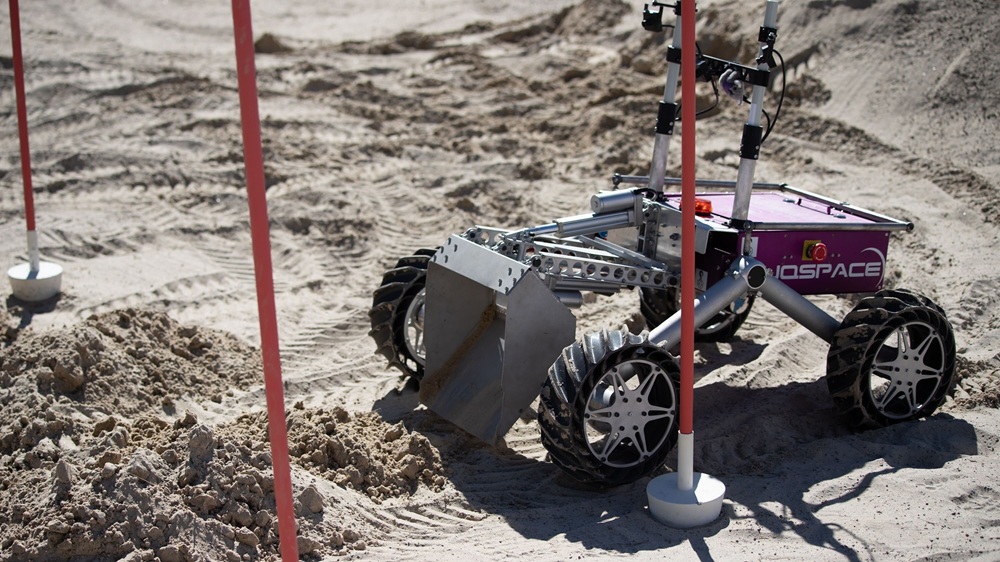
In this feature, six team members reflect on their rover Theseus V's performance and the job‑ready capabilities they've gained.
UQ Space’s win demonstrates the strength of Australia’s emerging space talent pipeline – engineers and operators who can design, test, iterate and deliver dependable systems in mission‑like conditions.





Meet Roo-ver
Australia's lunar rover that will go to the Moon with NASA.
Adriel Efendy, Project Lead
Mechatronics Engineering and Computer Science
Our paver deployment system had over five prototypes before it was reliable enough. Cameras were repositioned so the operator could view the connection well, and sand could pass through so the mechanism wouldn't clog. Extensive field testing paid off, and we got the highest mark for that round at ARCh.
Taylor Bridger, Technical Director
Mechanical and Aerospace Engineering
As the Technical Director, I felt that improvements to our autonomous, water extraction, element prospecting, and robotic arm systems would help us reach 1st place. With rules and regulations prioritising weight optimisation for the 2026 challenge, I knew that a lighter suspension system would be key to reaching this goal. As a team, we reviewed these ideas and agreed that these systems would be our priority for ARCh this year.
During my time with UQ Space, I’ve learnt countless skills, but through my leadership positions within the team, my people management skills have significantly developed. I have learnt to adapt my communication style and support alternate working styles for different team members. Understanding and adapting to individual members has helped me engage their interests and promote collaborative and supportive environment within the team both at competitions, meetings and around the workshop.
Isaac Ziebarth, Lead Avionics Engineer
Mechatronics Engineering
Success wasn't just the rover working. It was knowing the team after me could keep it going. I will graduate eventually, the rover doesn't. Success was leaving something the next cohort can actually pick up and build on, rather than a black box that falls over the second I'm not in the room.
Always back yourself, and back the people next to you. You'll feel behind when you start. Everyone does. You'll learn more from your team than any tutorial ever will. Show up and stick at it.
Alexandra Nash, Lead Operations Engineer
Mechanical and Aerospace Engineering
We introduced pre‑task and in‑task checklists and assigned each one to a single team member. That ownership model stopped tasks falling through the gaps and gave us far more reliable, repeatable performance across multiple mission windows.
The biggest lesson learned was the importance of fully understanding the rules and constraints which gave the team confidence when situations became chaotic. In a real mission environment, that same deep understanding is what allows operators to stay calm, think clearly, and act decisively.
Isaiah Watts, Payload Engineer
Mechanical and Aerospace
Considering the rover’s capabilities and ease of functionality was key to defining and developing a design that would operate efficiently, securely and in a manner that would allow the operator to effectively interact with the payload. This was a significant consideration and will undoubtedly continue to influence future payload designs.
Integrating within the team allowed me to learn advanced skills, strengthen my engineering design knowledge, learn from other member’s experiences and develop a stronger understanding of the rover’s systems. This served greatly in developing a payload that efficiently interfaces with the rover and subsequent systems.
Zac Apelt, Avionics Engineer
Mechatronics Engineering
A major change for this year’s competition was a redesign of the robotic arm which included an additional joint to allow the gripper to rotate. This was immeasurably useful for manoeuvring and positioning the propellant hose.
The Australian Rover Challenge showed me possible careers in space engineering that enable me to build practical, resilient robotic systems for real missions. It formed my interest in planetary robotics and has made me want to contribute to Australia’s growing capability in autonomous space systems.

Which space career is right for you?
Navigate a day on the Moon in our short interactive quiz to find out which role best suits your strengths.